

Nic w ostatnich latach nie wpłynęło bardziej na tempo rozwoju optyki użytkowej, niż drony. Kiedy myśleliśmy, że przyzwoity bezlusterkowiec, który kręci filmy w 4K i ma lepiej lub gorzej stabilizowaną matrycę – to kres możliwości w sprzęcie (pół)amatorskim – firmy produkujące drony bezpardonowo i bez ostrzeżenia zaatakowały kamerami 8K, z jednocalową albo pełnoklatkową matrycą, stabilizowanymi trójosiowymi gimbalami. Z flanki doszły jeszcze zoom’y rzędu 30x lub więcej i latające minikamery 4K, które można schować do kieszeni (jak Mavica Mini 2). W tej sytuacji człowiek może zrobić tylko jedno: fotografować i nagrywać jeszcze więcej!

NA ILE KARTA POZWOLI
– dorzucą od razu sceptycy, pesymiści i wyznawcy przynajmniej jednego z praw Murphy’ego. Niektórzy z nich mają w pamięci karty o pojemności 4GB, które pozwalały zrobić 200 zdjęć. Inni nie mogą zapomnieć kart, które nasze bezcenne, występujące tylko w jednej kopii fotografie po prostu zapominały, prezentując wypasione, okrągłe zera, kiedy sprawdzaliśmy „ile się jeszcze da wrzucić”. Ci najbardziej technicznie otrzaskani (w sensie „technicznie zaawansowani”, a nie pobici w stylu karate kyokushin) myślą natomiast: o ile nagranie się nie „przytnie”, albo nie „poklatkuje”. A mój kolega po lewej dorzuci do tego: albo zdjęcia nie będą gustownie przycięte, co drugie gdzieś w połowie!
Oni wszyscy mają rację i mylą się jednocześnie. Mają rację – bo wymienione zagrożenia są realne, ale i mylą się – bo my, dzięki naszej wiedzy (i nieustającemu wyścigowi producentów) potrafimy je wszystkie zniwelować niemalże do zera. I tym właśnie będziemy zajmowali się od teraz do samego końca tego tekstu.
SPEED CLASS
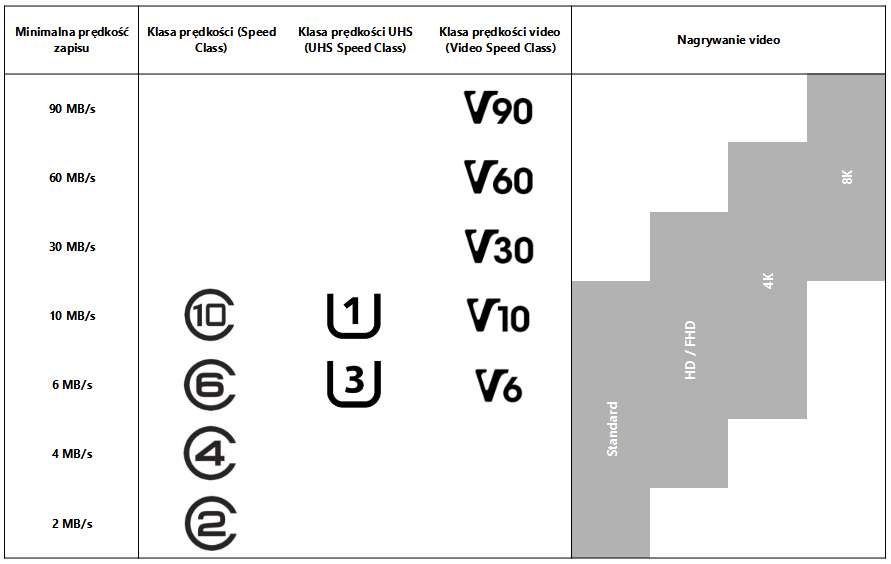
Wynalazki często przerastają swoich wynalazców – i to samo przytrafiło się naszym (nie)kochanym kartom SD. Kiedy, dawno temu, w młodszej epoce węgla wymyślano pierwsze karty SD – nikt jeszcze nie wiedział co to jest 4K. Twórcy kart nadali swoim wynalazkom przeróżne nazwy i oznaczenia – ale wszyscy od początku chcieli spójnego i jednolitego oznaczania prędkości. Uruchomili wyobraźnię, wybiegli sto lat w przyszłość i ustalili, że karty będą miały klasy prędkości (Speed Class), oznaczane literką C i liczbami 2, 4, 6 i 10. C2 oznaczało karty najwolniejsze, czyli takie, w przypadku których minimalna prędkość zapisu wynosiła – i tu zaskoczenie – 2 MB/s. Pozostałe liczby – analogicznie. Zatem najszybsze karty SD osiągały, kosmiczną na owe czasy, minimalną prędkość zapisu wynoszącą 10 MB/s!
Jak pamiętamy – na długo to nie wystarczyło. Coraz mniejsze i wyposażone w coraz lepsze matryce aparaty i kamery obrabiały coraz więcej danych, więc dostępne prędkości ich zapisu szybko stały się niewystarczające. Stwierdzono wtedy, że coś da się ugrać na sposobie komunikacji z bankami danych – i temu zawdzięczamy klasy prędkości UHS.
ULTRA HIGH SPEED
Tak zaczęto oznaczać karty SD wyposażone w nową magistralę – UHS właśnie. Miała być jedna – ale dziś mamy już trzy (UHS-I, UHS-II i UHS-III). Rozróżnimy je po I, lub jego krotności, umieszczonym gdzieś na karcie. Powie nam to, że karta jest nowocześniejsza i… tyle. Żeby utrudnić nam życie producenci przyjęli inne oznaczenie prędkości, na dodatek nie do końca zależne od tych pierwszych. Mamy więc karty o prędkości U1 i U3, czyli o minimalnej prędkości zapisu do 10MB/s i do 30MB/s. I mogą one mieć jedną z magistrali (UHS-I, UHS-II i UHS-III). Czy to wystarcza? Wielu z was myśli właśnie: przecież moja kamerka to i 90Mbps wideo zapisuje! Zatem odpowiedź jest prosta: nie, nie wystarcza.
KLASA V
Brzmi to dumnie, choć wprowadzenie tej klasy prędkości było raczej gonieniem uciekającego króliczka i dostosowaniem się do potrzeb rynku, a nie nowym rozdaniem… kart. Kamery nagrywające w 4K i 8K zaczynały już „klatkować” w przypadku najszybszych kart UHS i ten stan trwać nie mógł. A działo się naprawdę źle – bo klienci zaczęli kojarzyć karty SD z problemami z zapisem w przypadku najnowszych urządzeń. I nic nie mogło ich bardziej uspokoić niż karty z klasą prędkości V, jak video. Najszybsze z nich – V90 – z powodzeniem zapisują dane w ilości 90MB/s i szybciej i bez kłopotów radzą sobie z bitrate rzędu 120Mbps i więcej. Wygląda na to, że do formatu 8K włącznie powinny wystarczyć.
CO DALEJ?
Możemy być spokojni. Producenci kart SD odzyskali oddech i kontrolę nad sytuacją. Dziś pracują nad transferami rzędu 985MB/s, 1970MB/s i 3940MB/s (karty SD Express, oparte o magistralę PCIe), co powinno zabezpieczyć nas na jakiś czas. Możemy chwilowo o prędkościach kart SD nie myśleć – tym bardziej, że mamy do wspomnienia.
JESZCZE PARĘ RZECZY.
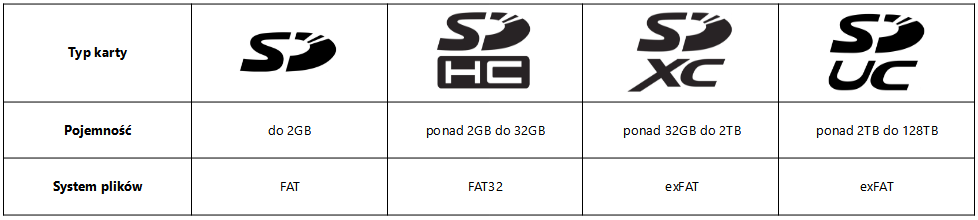
Oprócz oznaczeń prędkości czy typu magistrali na kartach SD znajdziemy jeszcze inne oznaczenia, które powinniśmy znać. Litery HC, XC i UC to oznaczenia pojemności. Moglibyśmy je zignorować (przecież wiemy, czy kupujemy kartę 64 czy 128GB), gdyby nie fakt, że narzucają nam system plików – czyli z naszego punktu widzenia sposób, w jaki kartę będziemy formatować. Karta SD bez oznaczeń pomieści do 2GB i formatować ją będziemy w systemie FAT. Tak – tym, na którym chodził DOS. Prędkością to nie pachnie, więc porzućmy je na rzecz HC (High Capacity, od 2GB do 32GB, system FAT32), XC (Extra Capacity, od 32GB do 2TB, system exFAT) i UC (oczywiście Ultra…, od 2TB do 128TB).

To wszystko, co trzeba dziś wiedzieć o kartach SD, żeby świadomie dopasowywać je do swoich urządzeń. To i to, co jest napisane w instrukcji obsługi naszego urządzenia. Bez tej wiedzy możemy kupić kartę UHS-II i użytkować ją bez żadnej korzyści w urządzeniu akceptującym standard UHS-I (systemy są kompatybilne w dół), albo dziwić się, że film jest pocięty na pliki 4GB na karcie HC (4GB to największy rozmiar pojedynczego pliku w FAT32).
Na koniec mały bonus, który jest odpowiedzią na często zadawane pytanie: co zrobić, jeśli nasze urządzenie obsługuje system FAT32, a my mamy kartę 64GB lub większą? Według pierwotnych założeń FAT32 miał obsługiwać nośniki do pojemności 32GB, więc Windows nam jej nie sformatuje. Dostępne są jednak narzędzia, które to potrafią – wystarczy poszukać frazy „fat32 format” i znajdzie się ich co najmniej kilka. Ja osobiście używam Raspberry Pi Imager, czyli bezpiecznego narzędzia, które przygotowuje karty SD dla Raspberry Pi. Bezpiecznym i wygodnym narzędziem jest też Seagate DiskWizzard. Dzięki nim możemy formatować w FAT32 karty do pojemności nawet 2TB.














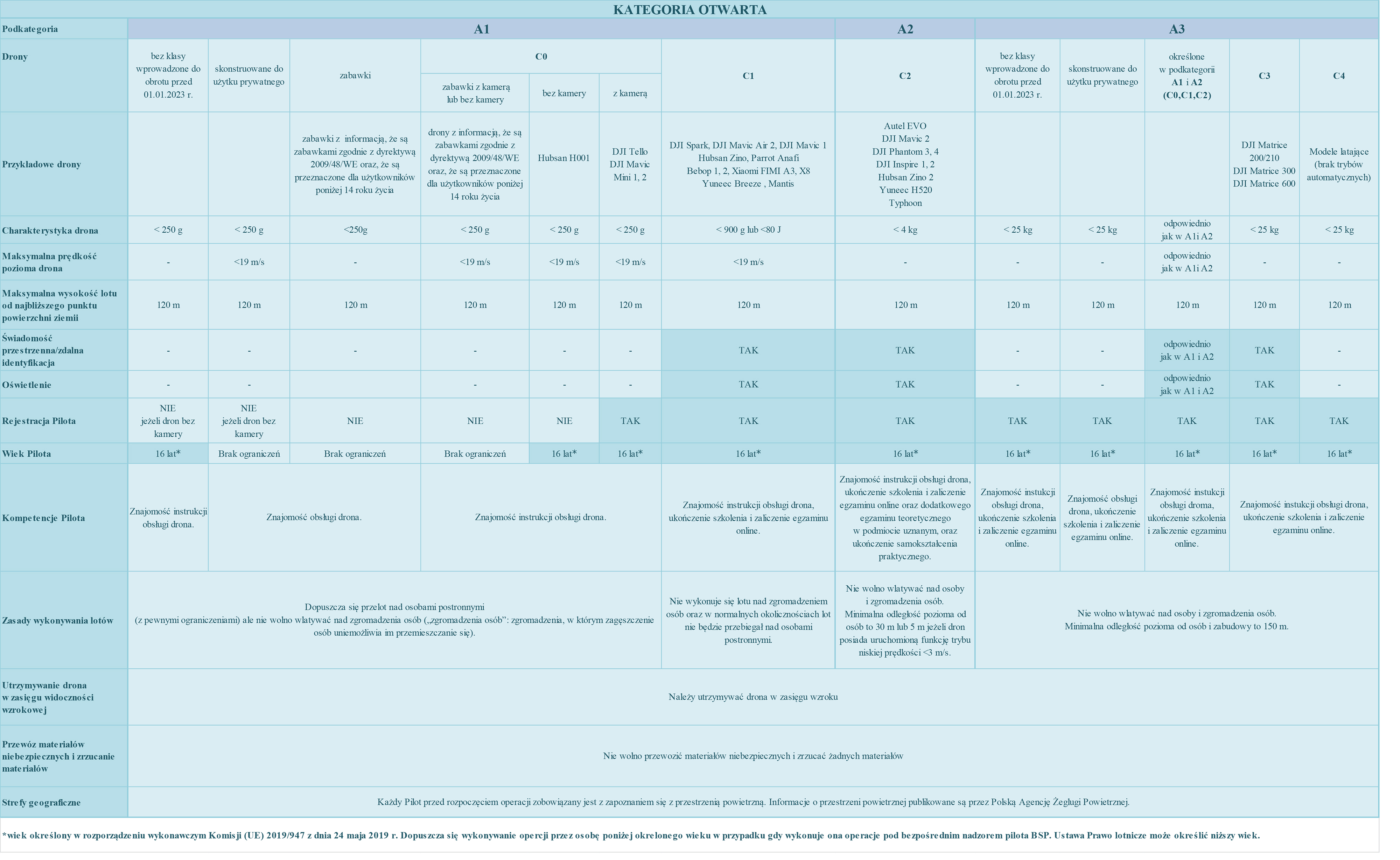
![[KLIKNIJ TUTAJ]](https://www.pansa.pl/storage/2020/12/kategoria_otwarta.jpg){kind=link}